- 产品详情
优璞科技开发的超宽带(UWB)一维精准测距系统,基于飞行时间(Time Of Flight)算法,可以支持最远880米视距范围内、分米级精度的精准测距需求。同一台测距仪可以同时提供针对多个定位标签的实时测距服务。
采用TOF算法的UWB测距技术具有以下优势:
1)定位精度高,实测下的距离分辨精度可达10-15厘米;
2)定位速度快,可以提供长时间、高可靠性的实时距离数据;
3)抗干扰能力强。
本系统工作在UWB频段(3.1GHz-10.6GHz)上,最常用的是信道2 (3.75GHz – 4.25GHz),带宽500MHz。按照欧洲和北美的UWB频段管制要求,信号发射功率为-41.3 dBm/MHz。
一维精准测距系统可用于对重要人物或资产的监控,比如寻人寻物、避免贵重物品遗落、照顾老人或者儿童、追踪目标的轨迹监控等。相应的应用场景举例如下图所示。



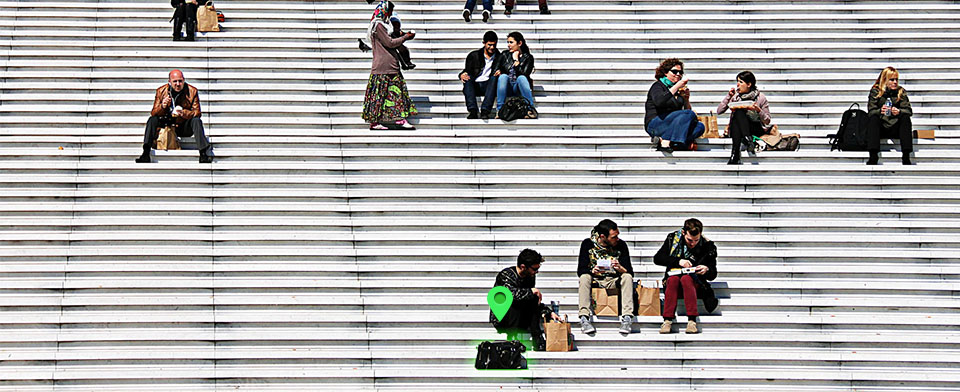
在UWB测距的基础上,通过综合运用陀螺仪、数字罗盘和加速度传感器等其它传感设备,可以进一步识别追踪标的物的方向角,大大增加系统的易用性。
一维测距系统用于反向定位
反向定位系统基本组成包括一台测距仪和若干定位标签。
和采用TDOA算法的实时定位系统不同,在反向定位系统中,测距仪主要依靠精确测量与多个标签间的距离,通过三角定位法计算自身位置。示意图如下:
应用于反向定位时,测距仪自己位置未知,作为参考点的标签位置固定,根据不同标签距离测距仪的距离推算出测距仪的位置。精度可保持不变。
采用此导航模式的主要优缺点总结如下:
优点:
1、 定位及导航精度高,通常情况下可达亚米级精度,略逊于RTLS系统;
2、 实时性好,最高定位速率可达16Hz,即每秒16次定位;
3、 系统构成简单,相对RTLS系统,成本大幅度降低;
4、 系统布设相对容易,但长期使用时标签需要外部电源供给;
5、 用户侧定位模式,机器人自己计算自己的位置,无需其它设备支持。
缺点:
1、 反向定位系统仅能支持一个测距仪的定位及导航;
2、 测距仪硬件需集成UWB模块;
3、 原测距仪中的软件和算法,需移植到测距仪的主处理器中,导致额外的工作量和移植费用。
反向定位适用于服务机器人等单元素的定位及导航。参见解决方案之机器人导航方案简介。
